乽傾儕僔傾偨傫傪帺棩惂屼偝偣偰傒偨偄乿
戞俇榖丂乣傾儕僔傾偨傫乮丠乯僼儗乕儉惢嶌乣
仭 0.彉榑
慜夞嶌惉偟偨偦傟偭傐偄儌僨儖偱偡偑丄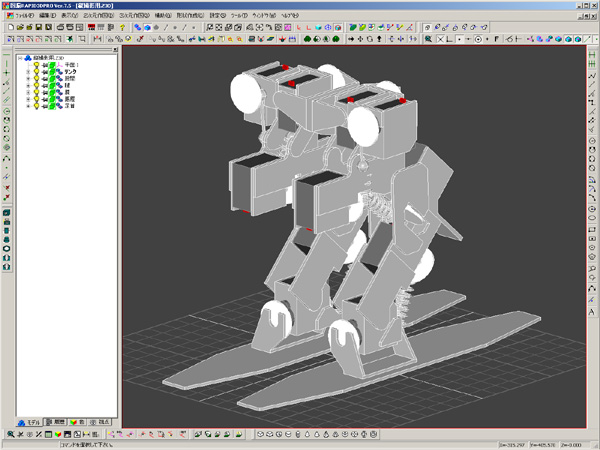
崱夞偼偙傟傪嬶尰壔偡傞偨傔偵傾儖儈嵽傪壛岺偟僼儗乕儉傪嶌惢偟偰偄偒傑偡丅
偟偐偟丄偙傟傪彂偄偰偄傞偺偑2012擭6寧丄
巚偄婲偙偣偽慜夞峏怴偺偍抦傜偣傪偟偨偺偑2011擭2寧21擔偺擔婰偱
>偁傝偟偁偪傖傫俆榖傪捛壛丄偍偦傜偔侾擭嬤偔怮偰偄偨偐側丒丒丒
崱搙偼1擭埲忋怮偰偨傫偩傛両両侾侾俀俁
傑偁傾僂僩僾僢僩偑侽偱側偄偩偗儅僔偩偲峫偊傞偙偲偵偟傑偡丅
仭 1.僥乕儅慖掕
慜夞愝寁偟偨僼儗乕儉傪幚嵺偵惢嶌偟傑偡丅崱夞偺妶摦傕棟榑傗抦幆偼昁梫偁傝傑偣傫丒丒丒
偲尵偄偨偄偲偙傠偱偡偑丄杮棃偼壛岺媄弍偑昁梫偱偡丅
偨偩崱夞偼惓捈側偲偙傠擔梛戝岺偩偲偐D.I.Y.偩偲偐
偦偺傊傫偺儗儀儖偩偲巚偄傑偡偺偱摿暿夝愢偼偟傑偣傫丅
仭 2.尰忬攃埇偲栚昗愝掕
慜夞愝寁偟偨埲壓偺嵽椏傪傑偢峸擖丄戝傑偐偵愗傝弌偟偟傑偡丅仸慡偰t1.5丄奜悺
丒斅嵽
35亊178丗2屄
25亊63丗4屄
25亊45丗4屄
25亊35丗4屄
25亊33丗4屄
25亊23丗4屄
25亊15丗2屄
丒傾儞僌儖
15亊15亊12丗12屄
丒怺C僠儍僱儖
15亊25亊54.5丗2屄
15亊25亊40丗2屄
15亊25亊25丗8屄
栚昗偼丄偙傟傜偺乽斅偺梾楍乿傪
愝寁偝傟偨僼儗乕儉偲偄偆婡擻惈晹昳偵偟丄
儘儃僢僩偲偟偰摦偔傛偆慻傒棫偰傞偙偲偱偡丅
仭 3.妶摦寁夋
慜夞偺愝寁偱偼丄娞怱側偲偙傠傪慡慠愝寁偟偰偍傜偢乮徫乯丄傑偢偼僱僕寠埵抲摍傪寛掕偡傞昁梫偑偁傝傑偡丅
偦偺屻丄僼儗乕儉傪戝傑偐偵宍忬弌偟偨傜丄
寠偁偗丄僞僢僾棫偰傪偟偰
嵟廔揑側僼儗乕儉宍忬偵巇忋偘偰偄偒傑偡丅
崱夞偼僆儕僕僫儖晲憰恄昉嶌惢偵岦偗偨僩儔僀傾儖揑側梫慺傕娷傒傑偡偺偱丄
傾儖儅僀僩張棟偼偦偺帪偺偍妝偟傒偵偲偭偰偍偒傑偡丅
仭 4.梫場夝愅
偱丄栤戣偼帪娫偑側偄
偙偺堦揰偵偮偒傑偡丅
偦傕偦傕帺戭偱惢嶌偟偰偄傑偡偺偱丄
巊梡偱偒傞愝旛偑尷傜傟偰偄傑偡丅
儂價乕梡搑偲偄偊偳摦嶌傪偡傞婡夿晹昳偱偡偺偱丄
偦傟憡墳偺惛枾偝傕媮傔傜傟傑偡丅
仭 5.懳嶔専摙偲幚巤
崱夞摿偵昁梫側傕偺偼丄傾儖儈慺嵽偺宍忬弌偟偲丄惛枾側埵抲偱偺寠偁偗偱偡丅
偙傟傜傪帪娫揑岠棪傛偔峴偆偨傔偵偼丄
壛岺婡偺摫擖偑晄壜寚偱偡丅
悽奅偵偼偝傑偞傑側壛岺婡偑懚嵼偟傑偡偟丄
偦傟偧傟偺壛岺曽朄傗惢嶌暔偺庬椶傕偝傑偞傑偱偡偑丄
忢搮庤抜偲側傞偲尷傜傟偰偒傑偡丅
崱夞偺傾儖儈偺椺偱偄偊偽丄
柺壛岺傪偡傞偲偄偊偽僼儔僀僗壛岺丄
寠偁偗壛岺傪偡傞偲偄偊偽僪儕儖偱偡丅
偙傟傜傪惛枾偵峴偆偨傔偵偼丄嵟掅偱傕倶亅倷偺堏摦偑壜擻側僥乕僽儖偑昁梫偱偡丅
僥乕僽儖偑暋悢偁偭偰傕幾杺側偩偗偱偡偺偱丄
侾偮偺僥乕僽儖偱僼儔僀僗傕僪儕儖傕埖偊傞偲傛偄偱偟傚偆丅
偦偆偄偆峫偊偱庡幉偵條乆側恘暔傪庢傝晅偗傜傟傞傛偆偵偝傟偨壛岺婡偲偄偊偽丄
儅僔僯儞僌僙儞僞偱偡丅
乮桭恖偺偄傞怷惛婡傪僗僥儅偟側偑傜乯
儅僔僯儞僌僙儞僞偼丄僷儗僢僩偺慁夞偐傜儚乕僋偺尨揰弌偟丄恘暔岎姺丄壛岺側偳
慡偰僾儘僌儔儉惂屼偝傟偨壛岺婡偱丄彮検懡昳庬惗嶻偐傜扨弮側戝検惗嶻傑偱侾戜偱偙側偡
婡夿壛岺愝旛偺儅儖僠儘乕儖僼傽僀僞乕偱偡丅
傕偪傠傫偍抣抜傕偦偺傊傫偺愝旛傛傝偼崅偔側傝丄
僐僗僩偲応強偺栤戣偐傜偲偰傕屄恖偱偼摫擖偱偒傑偣傫丅
偱丄儗儀儖傪壓偘偰偄偭偰峫偊偰傒傑偡丅
CNC僼儔僀僗斦 偼丄偦偺柤偺偲偍傝悢抣惂屼偝傟偨僼儔僀僗斦偱偡丅
偙偪傜偼儅僔僯儞僌僙儞僞摍偲偼堎側傝丄恘暔偼恖娫偑岎姺偡傞傛偆偵側傝傑偡丅
彫宆偺NC僼儔僀僗偼傑偩抣抜偑崅偔丄
偄傢備傞3D僾儕儞僞掱搙偺傕偺偱偼傾儖儈壛岺偑偱偒側偔側偭偰偟傑偄傑偡丅
偝傜偵儗儀儖傪棊偲偟偰扨弮側僼儔僀僗斦傪峫偊傑偡丅
偙偙偱惗偠傞栤戣偼丄僪儕儖偵傛傞寠偁偗壛岺偺傒偱偡丅
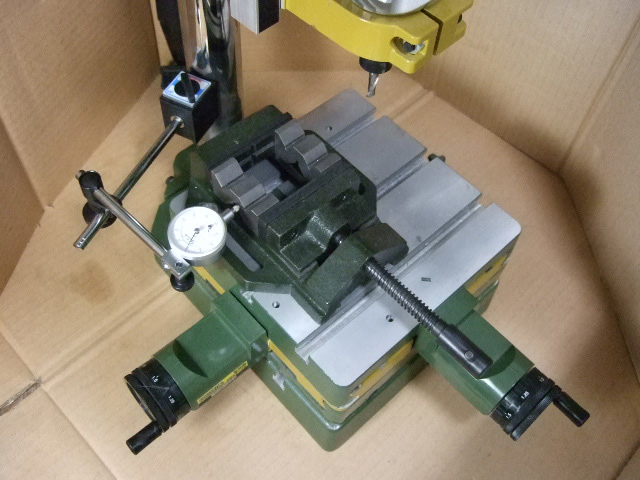
偦偙偱崱夞摫擖偟偨偺偑丄僪儕儖僠儍僢僋偑憰旛壜擻側彫宆僼儔僀僗斦偱偡丅

僒僀僘斾妑偺偨傔丄墶偵figma偍忟條偵偍棫偪梀偽偝傟偰偄偨偩偒傑偟偨丅
偙偪傜偺僾儘僋僜儞惢僼儔僀僗斦偼尒偰偺偲偍傝彫宆偱丄
晹壆偺僀儞僥儕傾偲偟偰傕廏堩偱偡丅
乮晹壆偵揥奐偟偰傕戝忎晇側戝偒偝丄偲偄偆堄枴偱偡乯
僥乕僽儖摍偑傾儖儈偱丄惛搙偼彮偟僾傾側偲偙傠偼偁傝傑偡偑丄
傾儖儈掱搙偺壛岺傕栤戣側偔偱偒丄儂價乕梡搑偵偼廫暘側儗儀儖偱偡丅
6mm僐儗僢僩僠儍僢僋偵壛偊偰僪儕儖僠儍僢僋傕憰旛偱偒傞偨傔丄
寠偁偗傕偦偙偦偙偺惛搙偱峴偆偙偲偑偱偒傑偡丅
仭 6.岠壥妋擣
壛岺偺慜偵丄僱僕埵抲偺寛掕傪偟傑偡丅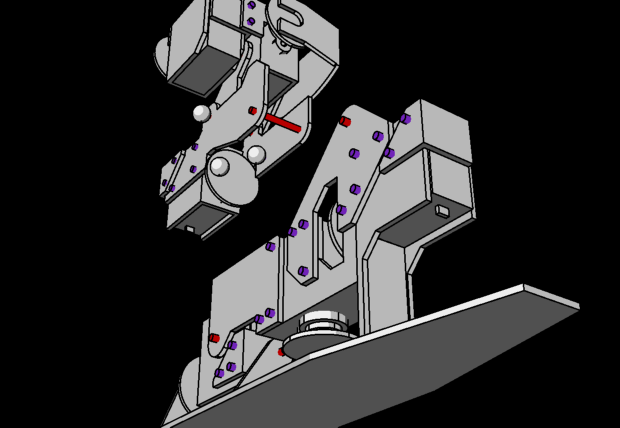
巊梡偡傞CAD僣乕儖偑曄傢偭偰偄傑偡偑丒丒丒丅
偁偲偼傂偨偡傜偵嶌偭偰偄偒傑偡丅
傑偢偼戝傑偐偵愗傝弌偟偨嵽椏偺椉抂柺傪僄儞僪儈儖偱僼儔僀僗壛岺偟傑偡丅

師偵丄僲僊僗偱悺朄傪尒側偑傜抂柺傪嶍偭偰偄偒丄巜掕偺挿偝悺朄偵偟傑偡丅

偙偺抜奒偱尨揰弌偟偑偱偒傞傛偆偵側偭偨偺偱丄
僞僢僾偺壓寠傗捠傝寠丄僒乕儃幉庴偗晹偺寠側偳傪奐偗偰偄偒傑偡丅

捠忢偺儃乕儖斦壛岺偱偡偲億儞僠偑昁梫偩偭偨傝偟傑偡偑丄
崱夞偼X僔儞僯儞僌僪儕儖偲僥乕僽儖偵擟偣偰億儞僠傪懪偨偢丄帪娫傪愡栺偱偒傑偟偨丅
師偵僞僢僾偺壓寠偵僞僢僾傪棫偰偰僱僕巭傔偑偱偒傞傛偆偵偟傑偡丅

偙偺傊傫偱朞偒偰偒傑偡偺偱慻傔傞晹昳偑慻傔傞偐偳偆偐妋擣偟偨傝偟傑偡丅

偁偲偼僼儗乕儉偺宍忬傪弌偡偨傔偵丄
V僽儘僢僋傗僟僀儎儖僎乕僕偱僶僀僗偺妏搙弌偟傪偟側偑傜僼儔僀僗壛岺傪偟傑偡丅

偙偆偟偰巄掕偱僼儗乕儉晹昳偑姰惉偱偡丅

師偵堦搙壖慻傒偟丄僒乕儃儂乕儞傪庤偱摦偐偟偨傝偟側偑傜
晄嬶崌拪弌傪峴偄傑偡丅
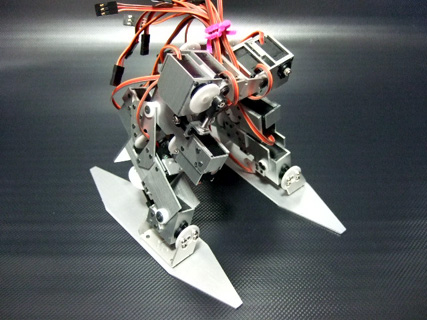
偙偺帪揰偱栺侾擭宱夁乮徫乯丅
僐儈僢僋儅乕働僢僩偺傢偝傃偝傫偺僗儁乕僗偱壖偺忋敿恎偑憰拝偝傟傑偟偨丅

偍偐偘偝傑偱奀奜偺恖偵幨恀傪嶣傜傟偨傝丄
崅暘巕嵽椏偱儘儃僢僩偺奜憰傪帺嶌偟偰傞恖丄
朸妛峑偺摨婜偺恖 偲偍榖偡傞婡夛偑偁傝傑偟偨丅
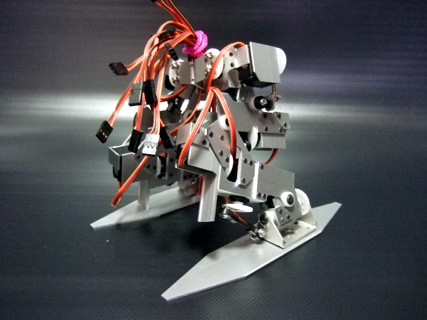
拪弌偝傟偨晄嬶崌傪夝寛偟偨傜丄忋敿恎乮揹抮傗婎斦晹傪娷傓乯偲慻傒崌傢偣偰姰惉偱偡丅
攚拞偺攝慄偼偙偺幨恀傪嶣偭偨偁偲偵傑偲傔傑偟偨丒丒丒丅
仭 7.昗弨壔媦傃崱屻偺壽戣
崱夞偼僼儔僀僗斦傪偼偠傔丄偁傞掱搙偺岺嬶椶傕懙偄儂價乕壛岺偵昁梫廩暘側娐嫬傪峔抸偡傞偙偲偑偱偒傑偟偨丅
崱屻偺壽戣丠
AE僙儞僒傗僗僥僢僺儞僌儌乕僞傪巊偭偰
僷僜僐儞偐傜NC惂屼偝偣傞偙偲偑偱偒傟偽戝暆側帪娫抁弅偲
埵抲曗姰偵傛傞壛岺壜擻側宍忬憹壛偑尒崬傔丄
偦偺偨傔偺晹昳傗媄弍傕懙偭偰偼偄傞偺偱偡偑丒丒丒
帪娫揑側梋桾偑側偔幚巤偱偒偰偄傑偣傫丅
偁丄偁偲娫偵崌傢偣側偺偱僶儔儞僗僶僱偼巇崬傔偰偄傑偣傫乮徫乯丅
戞俇榖偼埲忋偱偡丅
巜揈傗堄尒偑偁傝傑偟偨傜丄攺庤偐宖帵斅側偳偱
堦尵捀偗傞偲岾偄偱偡丅
戞俈榖偱偼丄僕儍僀儘傪巊傢偢扨弮側儌乕僔儑儞嶌惉傪梊掕偟偰偄傑偡丅